Control predictivo basado en modelo para procesos por lotes utilizando teoría de conjuntos
DOI:
https://doi.org/10.33131/24222208.366Palabras clave:
Reachable set, Controllable set, Controllable Reference Trajectory, Controllable Trajectory set, Robustness, Model Predictive Control, MPCResumen
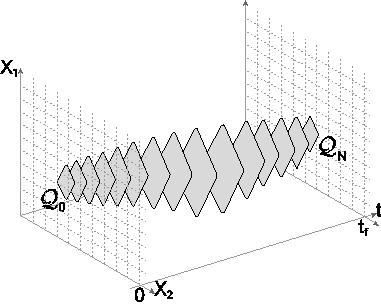
El problema de control de los procesos por lotes tiene varios desafíos. En general, es necesario lidiar con el comportamiento irreversible de las variables de estado, acciones correctivas limitadas y sensibilidad ante perturbaciones. En este artículo, el conjunto de trayectoria controlable se aplica a un control predictivo de modelo no lineal para mejorar el rendimiento del control de procesos por lotes. La principal capacidad del controlador propuesto es operar sobre una trayectoria segura y alejarse de las limitaciones mediante la incorporación del conjunto de trayectoria controlable. Cuando la solución del problema de optimización es factible, es posible asegurar el punto final del lote. Además, el control predictivo de modelo no lineal utiliza la trayectoria de referencia controlable como la trayectoria deseada para mejorar la robustez. Las características del controlador se ilustran mediante un proceso semi-lote en un escenario de perturbación. El esquema propuesto disminuye los índices de control bajo el escenario de perturbación, asegurando el alcance de los principales objetivos de control.
Descargas
Referencias bibliográficas
C. A. Gómez, L. M. Gómez, y H. D. Alvarez, «An approach to stability and controllability analysis in batch processes using set theory methods», en 2010 IEEE ANDESCON Conference Proceedings, ANDESCON 2010, 2010. doi: 10.1109/ANDESCON.2010.5633227.
D. Bonvin, B. Srinivasan, y D. Hunkeler, «Control and optimization of batch processes», IEEE Control Syst., vol. 26, n.o 6, pp. 34-45, dic. 2006, doi: 10.1109/MCS.2006.252831.
D. Q. Mayne, J. B. Rawlings, C. V. Rao, y P. O. M. Scokaert, «Constrained model predictive control: Stability and optimality», Automatica, vol. 36, n.o 6, pp. 789-814, 2000, doi: 10.1016/S0005-1098(99)00214-9.
D. L. Marruedo, T. Alamo, y E. F. Camacho, «Input-to-state stable MPC for constrained discrete-time nonlinear systems with bounded additive uncertainties», en Proceedings of the 41st IEEE Conference on Decision and Control, 2002., Las Vegas, NV, USA, 2002, vol. 4, pp. 4619-4624. doi: 10.1109/CDC.2002.1185106.
E. C. Kerrigan y J. M. Maciejowski, «Invariant sets for constrained nonlinear discrete-time systems with application to feasibility in model predictive control», en Proceedings of the 39th IEEE Conference on Decision and Control, 2000, vol. 5, pp. 4951-4956. doi: 10.1109/CDC.2001.914717.
F. Valencia, J. D. López, J. A. Patiño, y J. J. Espinosa, «Bargaining Game Based Distributed MPC», en Distributed Model Predictive Control Made Easy, vol. 69, J. M. Maestre y R. R. Negenborn, Eds. Springer Netherlands, 2014, pp. 41-56. [En línea]. Disponible en: http://dx.doi.org/10.1007/978-94-007-7006-5_2
E. F. Camacho y C. Bordons, Model Predictive Control. Springer Science & Business Media, 2013.
C. Ocampo-Martinez, Model Predictive Control of Wastewater Systems. London: Springer London, 2010. doi: 10.1007/978-1-84996-353-4.
S. Ruiz Álvarez y J. J. Espinosa, «Control de potencia y velocidad de rotación de un aerogenerador usando controladores predictivos», Rev. Cintex, vol. 23, n.o 1, pp. 60-76, oct. 2018, doi: 10.33131/24222208.311.
Z. K. Nagy y R. D. Braatz, «Robust nonlinear model predictive control of batch processes», AIChE Journal, vol. 49, n.o 7, pp. 1776-1786, jul. 2003, doi: 10.1002/aic.690490715.
S. Aumi y P. Mhaskar, «Safe-steering of batch process systems», AIChE Journal, vol. 55, n.o 11, pp. 2861-2872, 2009, doi: 10.1002/aic.11920.
C. A. Gómez-Pérez, L. M. Gómez, y H. Alvarez, «Reference Trajectory Design Using State Controllability for Batch Processes», Ind. Eng. Chem. Res., vol. 54, n.o 15, pp. 3893-3903, abr. 2015, doi: 10.1021/ie504809x.
B. Srinivasan, S. Palanki, y D. Bonvin, «Dynamic optimization of batch processes: I. Characterization of the nominal solution», Computers & Chemical Engineering, vol. 27, n.o 1, pp. 1-26, ene. 2003, doi: 10.1016/S0098-1354(02)00116-3.
K. S. Lee, I.-S. Chin, H. J. Lee, y J. H. Lee, «Model predictive control technique combined with iterative learning for batch processes», AIChE Journal, vol. 45, n.o 10, pp. 2175-2187, oct. 1999, doi: 10.1002/aic.690451016.
J. Flores-Cerrillo y J. F. MacGregor, «Latent variable MPC for trajectory tracking in batch processes», Journal of Process Control, vol. 15, n.o 6, pp. 651-663, sep. 2005, doi: 10.1016/j.jprocont.2005.01.004.
A. H. González, E. J. Adam, D. Odloak, y J. L. Marchetti, «Infinite horizon MPC applied to batch processes. Part I», en XIIIo Reunión de Trabajo en Procesamiento de la Información y Control (RPIC), Rosario, Argentina, 2009. doi: 10.13140/2.1.3504.7684.
A. González, E. J. Adam, D. Odloak, y J. Marchetti, «Infinite Horizon MPC applied to batch processes. Part II», en XIIIo Reunión de Trabajo en Procesamiento de la Información y Control (RPIC), Rosario, Argentina, 2009. Accedido: 20 de mayo de 2022. [En línea]. Disponible en: https://www.researchgate.net/publication/265761706_Infinite_horizon_MPC_applied_to_batch_processes_Part_II
L. M. Gómez, H. Botero, y H. Alvarez, «Análisis de la Controlabilidad de Estado de Sistemas Irreversibles Mediante Teoría de Conjuntos», Revista Iberoamericana de Automática e Informática Industrial, vol. 12, n.o 2, pp. 145-153, 2015, doi: j.riai.2015.02.002.
C. A. Gómez, L. M. Gómez, y H. D. Alvarez, «An approach to stability and controllability analysis in batch processes using set theory methods», en 2010 IEEE ANDESCON, sep. 2010, pp. 1-6. doi: 10.1109/ANDESCON.2010.5633227.
E. D. Sontag, Mathematical Control Theory, vol. 6. New York, NY: Springer New York, 1998. doi: 10.1007/978-1-4612-0577-7.
B. Srinivasan y D. Bonvin, «Controllability and stability of repetitive batch processes», Journal of Process Control, vol. 17, n.o 3, pp. 285-295, mar. 2007, doi: 10.1016/j.jprocont.2006.10.009.
F. Blanchini y S. Miani, Set-Theoretic Methods in Control. Cham: Springer International Publishing, 2015. doi: 10.1007/978-3-319-17933-9.
J. M. Bravo, T. Alamo, y E. F. Camacho, «Robust MPC of constrained discrete-time nonlinear systems based on approximated reachable sets», Automatica, vol. 42, n.o 10, pp. 1745-1751, oct. 2006, doi: 10.1016/j.automatica.2006.05.003.
C. A. Gomez-Perez y L. M. Gomez, «Controllable Reference Trajectory Applied to Batch Process Control», en 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), Medellín, Colombia, oct. 2019, pp. 1-6. doi: 10.1109/CCAC.2019.8921384.
S. Aumi y P. Mhaskar, «Robust model predictive control and fault handling of batch processes», AIChE J., vol. 57, n.o 7, pp. 1796-1808, jul. 2011, doi: 10.1002/aic.12398.
A. Marquez-Ruiz, M. Loonen, M. B. Saltık, y L. Özkan, «Model Learning Predictive Control for Batch Processes: A Reactive Batch Distillation Column Case Study», Ind. Eng. Chem. Res., vol. 58, n.o 30, pp. 13737-13749, jul. 2019, doi: 10.1021/acs.iecr.8b06474.
J. M. Bravo, D. Limon Marruedo, T. Alamo, y E. F. Camacho, «On the computation of invariant sets for constrained nonlinear systems: An interval arithmetic approach», Automatica, vol. 41, n.o 9, pp. 1583-1589, sep. 2005, doi: 10.1016/j.automatica.2005.04.015.
G. Calafiore, F. Dabbene, y R. Tempo, «Randomized algorithms in robust control», en 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475), Maui, Hawaii, USA, 2003, vol. 2, pp. 1908-1913. doi: 10.1109/CDC.2003.1272894.
M. Vidyasagar, «Statistical learning theory and randomized algorithms for control», Control Systems, IEEE, vol. 18, n.o 6, pp. 69-85, 1998.